
研究プロジェクトの紹介
最近の研究内容や研究成果の一部を紹介します。なお、関連する論文発表や詳細については国立情報学研究所のCINII等の論文データベースで検索することができます。
◆知的防犯カメラ(インテリジェントセキュリティカメラ)の開発
1. はじめに
近年の景気悪化に伴って、ひったくり・窃盗・ひき逃げ・拉致誘拐などの犯罪行為が多発し、社会の安全を脅かす事件が頻発している。警察庁犯罪統計報告によれば、平成24年度における強盗とひったくりの発生件数は10,083件であり、1日当たり約28件のひったくりが発生していることになる。すなわち,各種刑法犯罪の中でも簡単に実行できる「ひったくり」は日常的に発生する犯罪でもある。
一般に、これらの犯罪は人目につきにくい場所・時間帯で発生することが多く、夜間の路地裏や住宅街、人気の少ない夜道等が危険地帯とされる。無数にある人気のない場所に対して有人パトロールだけで防犯対応を行うことはコスト的に難しく、必ずしも効果的とはいえないため、監視カメラによる防犯が重要となる。そのため、犯罪行為の自動認識・検知を行う次世代型の知的防犯カメラを開発し、これを犯罪が起きやすい場所や人気のない場所に設置すれば、安価かつ効果的な防犯の実現が期待される。本研究では、現に起こりつつあるひったくり等の犯罪行為を人工知能技術を用いて自動的に検知するとともに、自動通報するシステムを実現する。
2.ひったくりの検出
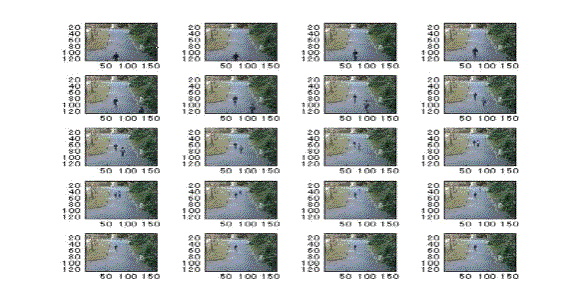
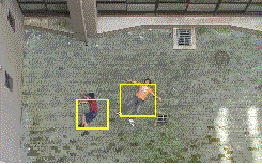
ひったくりは頻繁に発生する犯罪行為であり、高齢者や女性などの社会的弱者がが狙われやすい。特に、突然ひったくりの被害に遭うと転倒することや大怪我をすることがあり、場合によっては死亡するケースもある極めて悪質な犯罪である。下図は、道路を歩いている人物の後方から犯人が近づき、カバンをひったくって逃げるという状況を再現したものである(左上→右下)。この状況をビデオストリームとして撮影し動画像解析および挙動分析によって、ひったくりの有無を自動検知することを試みた。
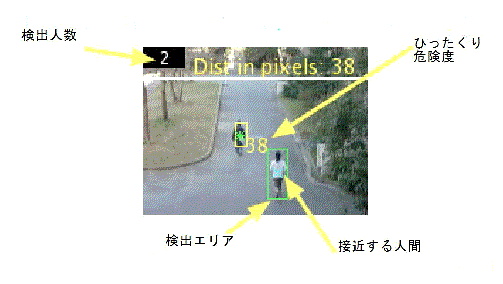
下図は、開発中のシステムの自動検知実行画面である.ビデオストリームから人物を検出するとともに、それぞれの行動パターンや動き情報を解析する.また解析結果を人工知能を用いて判定することにより、現段階ではひったくり発生を約95%前後の精度で検出することができる.
3.今後の目標
通常、ひったくり等の街頭犯罪は人気のないエリア・時間帯で発生することが多い。しかし、そのような潜在的に危険なエリアは無数にあるため、パトロールによって予防することは社会コスト的に困難である。したがって、本研究で開発される知的防犯カメラを潜在的に危険なエリアに設置することで、低コストで効果的な防犯および犯罪抑止効果を発揮できると期待される。
今後、さらに多種多様な状況への適応が可能になるように、頑健性と検知精度の向上を進めていく。さらに、赤外線カメラを活用する等により暗所撮影等への対応を図っていく。これは夜間や雨天時の犯罪検知に必要である。また、動画像解析アルゴリズムやAIシステム等の改良・高度化によって、様々な状況下に対応するとともにさらに正確な犯罪検知を実現していく。
4.関連発表論文等
[1]長山格:”機械学習を用いたひったくりを自動検知する知的防犯カメラ”,電気学会論文誌C・情報システム部門誌,Vol.136-C,No.3, pp.100-108(2016)
[2]Itaru Nagayama, Akira Miyahara,”An Intelligent Security Camera System for Kidnapping Detection”,Journal of Advanced Computational Intelligence and Intelligent Informatics,Vol.17, No.5, pp.746-752 (2013)
[3]宮原彬,長山格:”スケルトン特徴判別による知的防犯カメラの開発”, FIT2011(第10回情報科学技術フォーラム、函館大学),H-061,(2011)
[4]宮原彬,仲里直朗,長山格:”連続挙動解析による知的防犯カメラの開発” , FIT2010(第9回情報科学技術フォーラム、九州大学),J-020,(2010)
[5]K.Goya,I.Nagayama,et.al.,”A Method for Automatic Detection of Crimes for Public Security by Using Motion Analysis”,Proc.of the Fifth International Conference on Intelligent Information Hiding and Multimedia Signal Processing,CD,Vol.1, pp.736-741 (2009)
【謝辞1】本研究の一部は、高橋産業経済研究財団:平成19年度研究助成(次世代セキュリティシステムに関する調査と基礎研究)を受けて実施された。ここに記して謝意を表します。
【謝辞2】本研究の一部は、科学研究費補助金・基盤研究(C)(課題番号26350454)による補助を受けて実施された。ここに記して謝意を表します。
◆レスキュードローン(ARD:Automated Rescue Drone)制御ソフトウェア(ISGOR-V)の研究
1.はじめに
日本は地震や台風などの自然災害が発生しやすい国土である。そのため、災害時における救助活動・避難活動では、被災状況を速やかに把握することが重要となる。このとき、航空機や人工衛星で上空から俯瞰撮影した画像を用いて地上の被害状況・交通状況等を把握し活用できれば、速やかな捜索・避難・支援活動が可能になる。
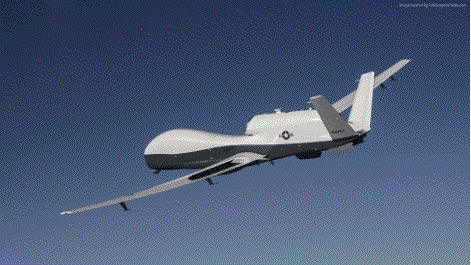
近年の技術革新に伴ってレスキューロボットや道案内ロボット、小惑星探査ロボットなど、移動ロボットの研究開発が多数行われている[1][2]。特に、UAV(Unmanned Aerial Vehicle)またはドローン(Drone)と言われる無人航空機の開発が世界各国で進められており、各種センサや映像通信によるリアルタイム操縦を実現している。UAVの例を下図に示す(wikipediaより引用[3][5])。UAVは、6時間から24時間以上の連続飛行が可能であり、遠隔地からのリアルタイム操縦によって非常に高度な即応性を実現できるため、大規模火災や化学汚染などの危険地帯であっても人的被害を被ることなく活動できるという大きなメリットがある。しかし、UAVの操縦には操縦コクピットシステム[4]と熟練オペレータが必要であり、また多数の機体を同時制御することは困難である。
一方、レスキュー活動では、最初の24時間が極めて重要とされており、生存者を捜索するための即応性が必須である。ところが、現在では人員不足や予算不足、2次被害を防止する等の観点から、必ずしも十分な即応捜索が実現できていないケースがある。このような事態を根絶するため、UAVまたはDroneを活用して即時に広範囲を多くの機体で捜索することができれば極めて有益である。このとき、ヘリコプター型ロボットDroneは広範囲を飛行可能であるなど運動性能が高いため、災害救助時の観測機や捜索機として活用できる。
自律的に環境情報を処理して移動するロボットでは、対象物認識と環境に応じた判断機能の実装が重要である。我々の研究室では、ヘリコプター型ロボットにおいて、自動的に遭難者・被害者等の捜索を行う能力を備えた知的制御ソフトウェアシステム(ISGOR-V)の研究・開発を行っており、これが実用化されれば様々な状況での活用が期待される。特に、災害発生最初の24時間において、2次被害等を危惧することなく迅速に生存者を捜索する即応性の実現が期待される。本研究では、海難救助や被害観測における捜索を支援・自動化することを目的として、ヘリコプター型ロボットDroneを用いた自動捜索支援システムを開発する。
2.自動捜索支援システム
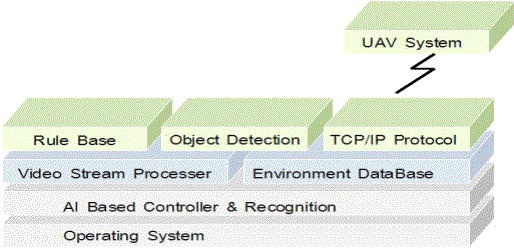
本研究室において開発中のヘリコプター型ロボットDrone制御システムの概要を下図に示す。ヘリコプター型ロボットDroneには、前方と下方を撮影するカメラが搭載されている。制御用計算機を直接ヘリコプター型ロボットに搭載することは、現時点では積載量過重となって現実的でないため、ロボットと制御用計算機を常時無線接続することにより一体として運用されるシステムとなっている。制御用計算機はヘリコプター型ロボットからの各種センサー信号を受信するとともに、飛行方向、高度、着陸、離陸などの制御コマンドを送信することが可能であり、ヘリコプター型ロボットを自由にコントロールできる。ここで,制御用計算機に格納された制御ソフトウェア(ISGOR-V)は,ロボットから送信される各種センサー信号およびカメラ映像を解析して,目標となる物体を自動探索・識別するとともに適切な行動を推論し,制御コマンドを指令する.また、制御ソフトウェアISGOR-VはC言語で記述されており、ニューラルネットワークやファジィ推論器、事例ベース推論システム等を実装することができる。
ISGOR-Vの機能のうち、地上に配置されたマークを発見する捜索性能について記述する。遭難時には、救難信号の発信または救難記号を描くことがしばしば行われるので、その状態を想定してマークの識別を試みた。通常、上空からは俯瞰撮影となるので、斜め角度からの撮影となる。すなわち、飛行捜索時に遭難者を発見するのはほぼ必ず遠方からであり、運良く遭難者の真上を通過することは稀である。◎、○、△、□の4種類のマークを対象として、上空から撮影するとともに正しく識別できるかどうか実験を行った結果を下図に示す。このとき、映像通信による信号劣化を考慮して、画像データにごま塩ノイズを重畳して実験を行った。実験の結果、上空からのマーク識別が実現可能であることがわかった。このとき、平均認識率は、5%ノイズ重畳において60°俯瞰で100%、45°俯瞰で70%となった。また、ノイズ重畳レベルが大きくなるにつれて、当然の如く認識精度は低下した。
また、新たに地上に倒れている人間を自動検知するための基礎実験システムを構築した。実験の様子を下図に示す。これは上空から撮影した映像から地上に倒れている人間を捜索&自動検知することを目的としており、画像解析により「人間」もしくは「人間のようなもの」を認識するように学習したAIシステムを用いている。上空から撮影した画像(上)から、画像(下)のように人体を探知することが出来る。

3.今後の目標
災害発生最初の24時間において、災害の危険性や2次被害等を危惧することなく迅速に被災状況を把握するとともに、生存者を捜索・救助する即応性を実現することは、極めて重要である。特に、捜索・救助の遅れは重大な結果をもたらすため、自然災害等の多発する我が国においては喫緊の課題である。本研究により開発される自動捜索支援システムでは、例えば災害発生直後30分以内に数十機を発進させて、広範囲を同時捜索する等の活用方法を想定している。捜索によって生存者を発見した場合、GPSにより直ちに位置を特定することができるので、ピンポイントで救助隊を派遣することができる。さらに、十分に高い性能を持つUAV機体を用いれば、12時間~24時間に渡って長時間連続滞空しつつ精密に地上/海上を捜索することも可能であると期待される。
今後は、複雑な背景があるときの物体識別能力を向上させることと、夜間捜索等に対応するための暗所識別能力を実装することが必要である。また、様々な物体や形状変形に対応する高度な識別能力を開発する必要がある。
4.参考文献等
[1]石川仁史,宮原 彬,長山 格,:”知的画像処理による3次元移動ロボットの制御”,FIT2011(第10回情報科学技術フォーラム,函館大学),H-079(2011)~
[2]幸喜奈月,長山 格,:”画像センシング情報に基づく自律移動ロボットの障害物回避に関する研究”,FIT2004(第3回情報科学技術フォーラム,同志社大学),I-013,pp.27-28(2004)~
[3] http://ja.wikipedia.org/ RT-16 T-ホーク~
[4] http://ja.wikipedia.org/ MQ-1 Predator controls~
[5] http://ja.wikipedia.org/ RQ-4
◆ビル火災における最適避難誘導シミュレーションの研究
1.はじめに
建築技術の発達と不動産価格の上昇等によって世界各地で多数の高層ビルが建設され、オフィスビルや大規模商業集積施設などとして利用されている。 通常、高層ビルには防災設備が設置されているが、ビル火災の発生時は火炎・有毒ガス等によって極めて甚大な被害が生じるため、速やかな避難・脱出が最優先とされる。 一般に、避難時のエレベータ使用は禁じられるため、階段を利用して避難することが多い。 ところが、多数の避難者が階段や通路に殺到すると転倒・圧死などの二次被害が発生しやすく、しばしば円滑な避難・救助活動の妨げとなっている。そのため、非常時の高層ビル内における脱出路や階段の使用状況をモニタリングし、効率的に避難できるよう誘導する広域避難誘導システムが必要となる。すでに、群衆の行動分析に関して様々な研究が行われており[1]、パニック状態の群衆がどのような運動様式を取るのか解析した結果や分析結果が示されている。これらに対して、本研究では動的に変化する状況においてマルチエージェント技術による群衆行動シミュレーションを行い、最適な自動誘導実現のための方式を検討する[2][3]。
2.群衆行動シミュレーション
一般に、火災や地震発生時に群衆が屋内のどの地点に分布しているかは時間帯や時季によって大きく異なるという特徴がある。そのため、群衆の分布は動的に変化するので逐次最適な避難戦略を計画する必要がある。さらに、避難路の状態によって適切な避難経路は逐一異なるはずであるから、常に状況に応じた最適経路を求める必要がある。従って、本システムでは群衆の分布と避難路の状況を整合させる働きが必要になる。
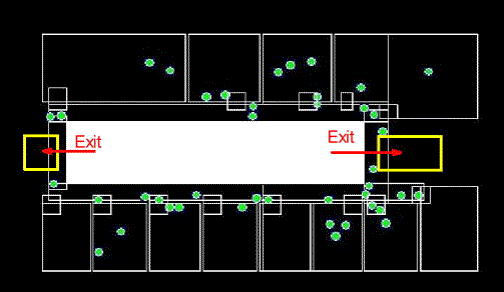
下図は、ビル内における避難シミュレーションのスクリーンショットである。緑の丸点は各部屋にいる人間を表しており、避難時に最寄りの出口(Exit)へ移動している状況を示している。このとき、一定数以上の脱出者が一つの出口に殺到すると渋滞・輻輳状態となり、かえってスムーズな脱出を妨げることになる。従って、渋滞や輻輳が発生しないように人流を制御し、スムーズな避難を実現するためのアルゴリズムや制御システムを開発する必要がある。
3.今後の課題
今後、人間の心理特性や行動特性を反映したシミュレーションモデルを構築し、さらに正確なシミュレーションを実行できるように機能向上を図る。また、屋外や都市部における地理的条件を考慮した避難シミュレーションへも拡張する計画である。
4.関連文献
[1]
[2]津波古正輝・国場幸祥・長山格,:”屋内画像サーベイランスによる群衆の避難誘導シミュレーション”,FIT2011(第10回情報科学技術フォーラム,函館大学),H-008(2011)~
[3]津波古正輝・大城浩一・長山格,:”避難誘導のための群衆行動制御シミュレーション”,電気学会次世代産業システム研究会,(沖縄高専),IIS-11,p.33-38(Mar.2011)~
[4]